This is my 3d library, from my personal R5RS build; It requires my .obj library be loaded.
At the end I’ve also attached and commented out a few examples and demos.
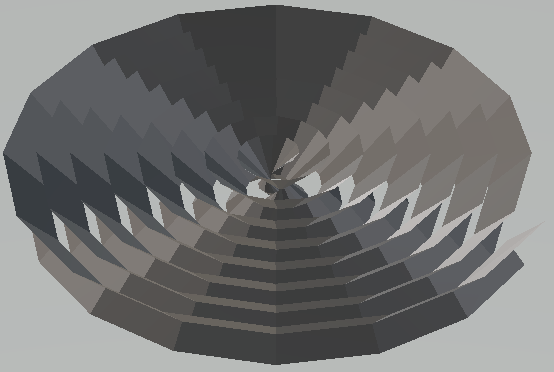
The simplest top-level Function is the surface of revolution, you simply enter a 2d shape as a list of 2d-points (just cons cells, no special point type), and a rotational-resolution.
The function of revolution does the same thing but with a shape generating function instead of a shape.
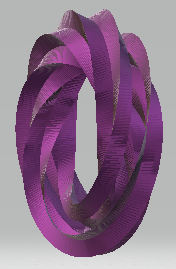
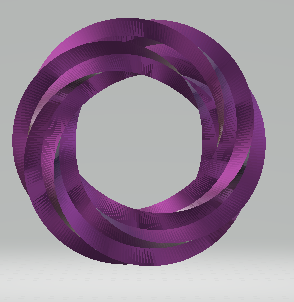
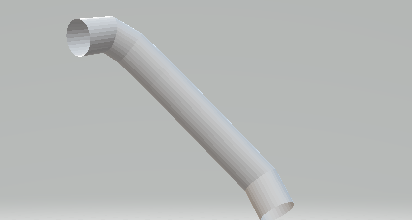
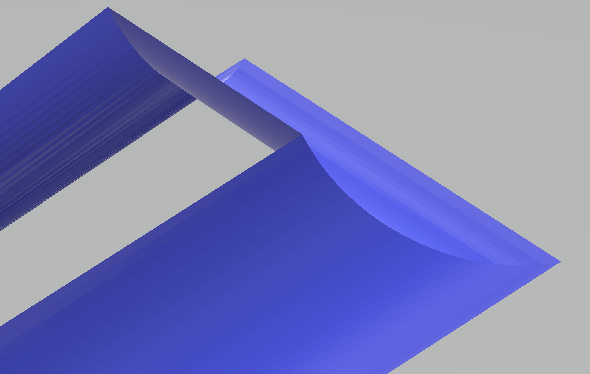
Extrude2d (and dynamic-Extrude2d) is the main function, the code is littered with examples of its use, most are at the bottom, you must use a shape and a path for the extrusion, but you have the option of using path2d (path2d points closed) or path-rolls2d (path-rolls2d points rolls closed), the variable closed is to specify if the first point in the path is the last point, funnily enough they don’t have to be the same point it actually tells the program to make sure they’re both on a plane with identical slope and roll.
IWill come back and document/comment everything soon; LISP is hard enough without me making it harder, in the meantime I’d say the demo functions should be sufficient to understand how to use it.

(load "obj.scm")
;;(load "walls.scm") I've commented this out because my walls library isn't done yet.
(define (merge-faces a b)
(faces
(+ (car a) (car b))
(append (cadr a) (cadr b)) (append (cddr a) (map (lambda (x) (map (lambda (y) (+ y (car a))) x)) (cddr b)))))
(define (faces vc v f) (cons vc (cons v f)))
(define (faces->obj f) (.obj (cadr f) (cddr f)))
(define (mean-angle a1 a2) (let ((mean (/ (+ a1 a2) 2))) (if (> (abs (- mean a1)) (* .5 pi)) (mod (+ mean pi) tau) mean)))
(define (cross-section-vertices x magnitude rot-res) (maprange (lambda (a)
((lambda (angle) (3vector x (* magnitude (cos angle)) (* magnitude (sin angle)) )) (* 2 pi (/ a rot-res)) )) rot-res))
(define (faces-of-revolution len rot-res depth) (if (= 1 len) '() (append
(maprange (lambda (x) `(,(+ x 1 (* depth rot-res)) ,(+ x 2 (* depth rot-res)) ,(+ rot-res (* depth rot-res) x 1) ,(+ rot-res (* depth rot-res) x))) rot-res)
(faces-of-revolution (- len 1) rot-res (+ depth 1)))))
(define (vertices-of-revolution coordinates rot-res)
(if (null? coordinates) '() (append (cross-section-vertices (caar coordinates) (cdar coordinates) rot-res)
(vertices-of-revolution (cdr coordinates) rot-res))))
(define (surface-of-revolution coordinates rot-res)
(let ((vertices (vertices-of-revolution coordinates rot-res))
(faces (faces-of-revolution (length coordinates) rot-res 0))
)
(.obj vertices faces)
))
(define (function-of-revolution function start end res rotres)
(surface-of-revolution (maprange (lambda (x)
(let ((pos (+ start (* (/ x (- res 1)) (- end start)))))
(cons pos (function pos) ))) res)
rotres
))
(define (dynamic-function-of-revolution function start end res rotres)
(dynamic-surface-of-revolution (maprange (lambda (x)
(let ((pos (+ start (* (/ x (- res 1)) (- end start)))))
(cons pos (function pos) ))) res)
rotres
))
(define (angle-dependant-generatrix f) (lambda (angle) (f angle)))
(define (bi-generatrix condition f1 f2)
(angle-dependant-generatrix
(lambda (angle) (if (condition angle) f1 f2))))
(define (bi-generatrix-coordinates condition g1 g2)
(if (= (length g1) (length g2))
(angle-dependant-generatrix
(lambda (angle) (if (condition angle) g1 g2)))))
(define bigen (bi-generatrix (lambda (angle) (< (/ pi 6) (mod angle (/ pi 3)))) sin (lambda (x) (* (sin x) .2 ))))
;(define bigen (bi-generatrix-coordinates (lambda (angle) (< (/ pi 6) (mod angle (/ pi 3)))) '(0 1 4 2) '(0 2 3 4)))
(define (bowl-function width height thickness) (function-of-revolution sin (* 1.5 pi) (* 2 pi) 32 32))
(define (cup-coordinates height radius thickness)
`((0 . 0)
(0 . ,radius)
(,height . ,radius)
(,height . ,(- radius thickness))
(,thickness . ,(- radius thickness))
(,thickness . 0)
))
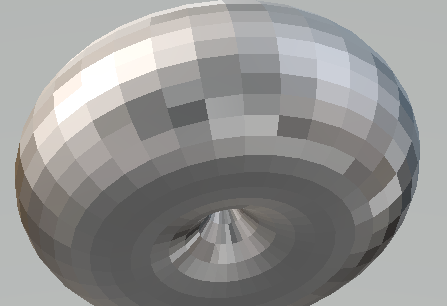
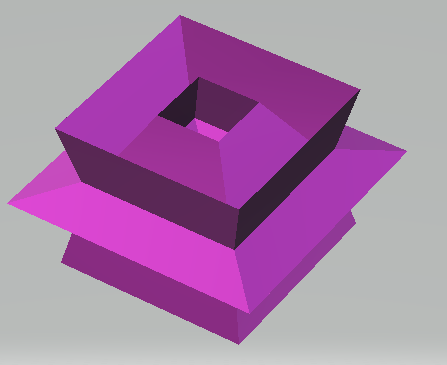
(define (bowl-coordinates height radius exp1 exp2 thickness steps)
(maprange (lambda (x)
(cons (* height (expt (sin (+ (/ pi 2) (* (/ x steps) (/ pi 2)))) exp1)) (* 1.0 (expt (/ x steps) exp2) radius))) (+ steps 1)))
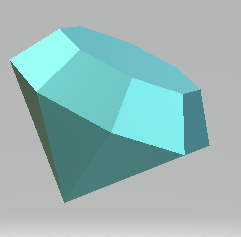
(define (cut-gem-coordinates height radius) `((0 . 0) (,(* height .7) . ,radius) (,height . ,(* radius .7)) (,height . 0)))
(define (sum-2-lists list1 list2) (if (null? list1)
'()
(cons
(+ (car list1) (car list2))
(sum-2-lists (cdr list1) (cdr list2)))))
(define x-axis (lambda (x) `(,x 0 0)))
(define y-axis (lambda (x) `(0 ,x 0)))
(define z-axis (lambda (x) `(0 0 ,x)))
(define (azimuth-to-axis angle) ((lambda (xval yval) (lambda (x) `(,(* xval x) ,(* yval x) 0))) (cos angle) (sin angle)))
(define (plane origin x-func y-func)
(lambda (x y) (apply 3vector (sum-2-lists origin (sum-2-lists (x-func x) (y-func y))))))
(define (plane-roll origin x-func y-func . roll)
(lambda (x y) (apply 3vector (sum-2-lists origin (sum-2-lists
(x-func (+ (* (cos (car roll)) x) (* (cos (+ (car roll) (* pi .5))) y))) (y-func (+ (* (sin (car roll)) x) (* (sin (+ (car roll) (* pi .5))) y))))))))
(define (extrude2d-section path generatrix)
(if (null? generatrix)
'()
(cons (path (caar generatrix) (cdar generatrix)) (extrude2d-section path (cdr generatrix)))
))
(define (extrude2d-vertices path generatrix)
(if (null? path)
'()
(append (extrude2d-section (car path) generatrix) (extrude2d-vertices (cdr path) generatrix))
))
(define (extrude2d-faces-section genlength n)
(maprange
(lambda (x) `(,(+ n x) ,(+ n genlength x) ,(+ n genlength 1 x) ,(+ n 1 x))) (- genlength 1)))
(define (dynamic-extrude2d-vertices path generatrix step totalsteps)
(if (null? path)
'()
(append
(extrude2d-section (car path) (generatrix step (/ step totalsteps)))
(dynamic-extrude2d-vertices (cdr path) generatrix (+ step 1) totalsteps))
))
(define (extrude2d-faces pathlength genlength n)
(if (= pathlength 0)
'()
(append (extrude2d-faces-section genlength n) (extrude2d-faces (- pathlength 1) genlength (+ n genlength)))))
(define (extrude2d-cap-section genlength pathpos n) (let ((startpos (+ (* genlength pathpos) 1))) `(,(+ startpos n)
,(+ 1 n startpos)
,(+ startpos (- genlength n 3))
,(+ startpos (- genlength n 2)))))
(define (extrude2d-cap genlength pathpos)
(maprange
(lambda (x) (extrude2d-cap-section genlength pathpos x))
(- (/ (- genlength 1) 2) 1)))
(define (extrude2d path generatrix startcap endcap)
(let ((vertices (extrude2d-vertices path generatrix)))
(faces (length vertices) vertices (append (extrude2d-faces (- (length path) 1) (length generatrix) 1) (if startcap (extrude2d-cap (length generatrix) 0) "") (if endcap (extrude2d-cap (length generatrix) (- (length path) 1)) ""))
)))
(define (dynamic-extrude2d path genfunc)
(.obj (dynamic-extrude2d-vertices path genfunc 0 (- (length path) 1)) (extrude2d-faces (- (length path) 1) (length (genfunc 0 0)) 1)
))
(define (path2d-angles points)
(if (null? (cdr points))
'()
(let ((currentline (+ (/ pi 2) (atan-points (car points) (cadr points)))))
(cons currentline (path2d-angles (cdr points)))
)))
(define (pathpoints->origin point) `(,(car point) ,(cdr point) 0))
(define (open-path-angles->planes points angle last-point) (if (null? angle)
;;The last point
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis last-point) z-axis) '())
(if (null? last-point)
;;The first point
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis (car angle)) z-axis) (open-path-angles->planes (cdr points) (cdr angle) (car angle)))
;;other points
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle (car angle) last-point)) z-axis) (open-path-angles->planes (cdr points) (cdr angle) (car angle)))
)
))
(define (closed-path-angles->planes points angle last-point first-point) (if (null? angle)
;;The last point
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle last-point first-point)) z-axis) '())
(if (null? last-point)
;;The first point
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis (car angle)) z-axis) (closed-path-angles->planes (cdr points) (cdr angle) (car angle) first-point))
;;other points
(cons (plane (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle (car angle) last-point)) z-axis) (closed-path-angles->planes (cdr points) (cdr angle) (car angle) first-point))
)
))
(define (path-angles->planes points path closed)
(if closed
(closed-path-angles->planes points path (final-element path) (car path))
(open-path-angles->planes points path '())))
(define (open-path-angles-rolls->planes points angle rolls last-point) (if (null? angle)
;;The last point
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis last-point) z-axis (car rolls)) '())
(if (null? last-point)
;;The first point
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis (car angle)) z-axis (car rolls)) (open-path-angles-rolls->planes (cdr points) (cdr angle) (cdr rolls) (car angle)))
;;other points
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle (car angle) last-point)) z-axis (car rolls)) (open-path-angles-rolls->planes (cdr points) (cdr angle) (cdr rolls) (car angle)))
)
))
(define (closed-path-angles-rolls->planes points angle rolls last-point first-point) (if (null? angle)
;;The last point
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle last-point first-point)) z-axis (car rolls)) '())
(if (null? last-point)
;;The first point
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis (car angle)) z-axis (car rolls)) (closed-path-angles-rolls->planes (cdr points) (cdr angle) (cdr rolls) (car angle) first-point))
;;other points
(cons (plane-roll (pathpoints->origin (car points)) (azimuth-to-axis (mean-angle (car angle) last-point)) z-axis (car rolls)) (closed-path-angles-rolls->planes (cdr points) (cdr angle) (cdr rolls) (car angle) first-point))
)
))
(define (path-angles-rolls->planes points path rolls closed)
(if closed
(closed-path-angles-rolls->planes points path rolls (final-element path) (car path))
(open-path-angles-rolls->planes points path rolls '())))
(define (path2d points closed)
(let ((angles (path2d-angles points)))
;(if closed
(path-angles->planes points angles closed)
))
(define (path-rolls2d points rolls closed)
(let ((angles (path2d-angles points)))
;(if closed
(path-angles-rolls->planes points angles rolls closed)
))
;(define testpath (path2d '((0 . 0) (2 . 0) (3 . 1) (4 . 3) (7 . 10) (7 . 12)) #t))
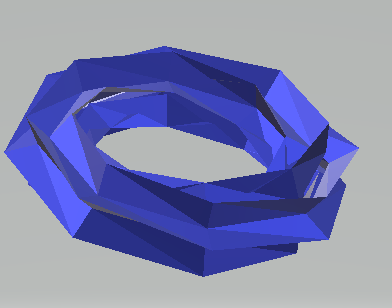
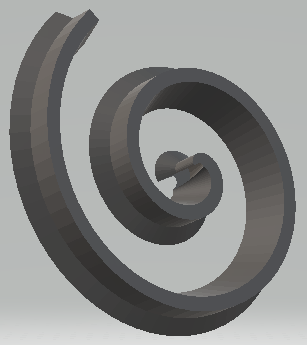
(define spiralpath (path2d (maprange (lambda (x) (cons (* x .1 (cos (* x (/ tau 64)))) (* x .1 (sin (* x (/ tau 64)))))) 128) #f))
(define (ellipsegen wr hr steps)
(let ((stepang (/ pi .5 steps)))
(maprange (lambda (n) (cons (* wr (cos (* n stepang))) (* hr (sin (* n stepang))))) (+ 1 steps)) ))
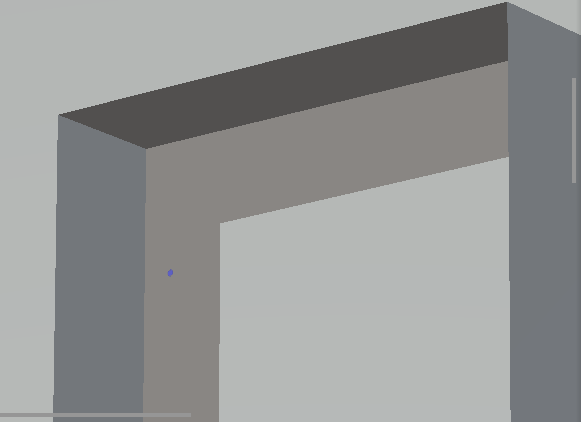
(define (housewalls w l h doorsize)
(extrude2d
(path2d `((0 . 0) (,(/ h 2) . 0) (,h . 0)) #f)
(lines->polygon `((,(- 0 w) . ,0) (,(- 0 w) . ,l)(,w . ,l) (,w . ,(- 0 l)) (,(- 0 w) . ,(- 0 l)) (,(- 0 w) . ,(- 0 doorsize))) .6)
#t
#t)
)
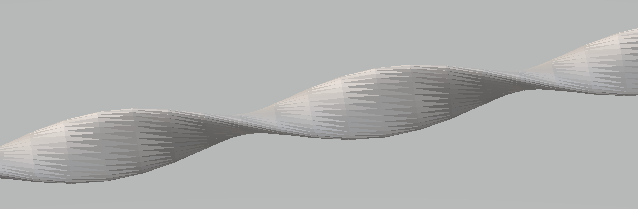
(define (gear r1 r2 teeth height)
(dynamic-extrude2d
(path2d (ellipsegen .1 .1 360) #t)
(lambda (step r)
(if
(< (mod (* r tau) (/ tau teeth)) (/ tau (* 2 teeth)))
`((-.1 . 0)(,r1 . 0) (,r1 . ,height) (-.1 . ,height))
`((-.1 . 0)(,r2 . 0) (,r2 . ,height) (-.1 . ,height))))
))
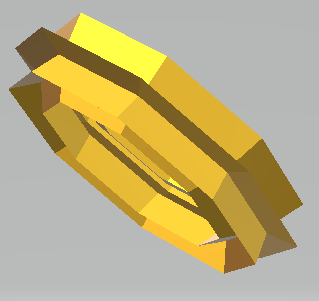
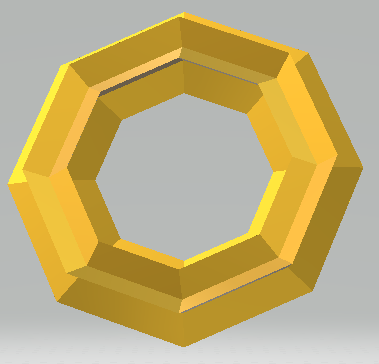
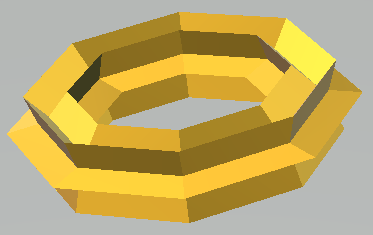
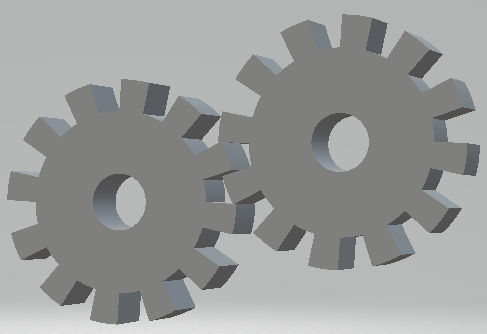
(define (gear-hollow r1 r2 holeradius teeth height)
(dynamic-extrude2d
(path2d (ellipsegen .1 .1 360) #t)
(lambda (step r)
(if (< (mod (* r tau) (/ tau teeth)) (/ tau (* 2 teeth)))
`((,holeradius . 0) (,r1 . 0) (,r1 . ,height) (,holeradius . ,height) (,holeradius . 0))
`((,holeradius . 0) (,r2 . 0) (,r2 . ,height) (,holeradius . ,height) (,holeradius . 0))))))
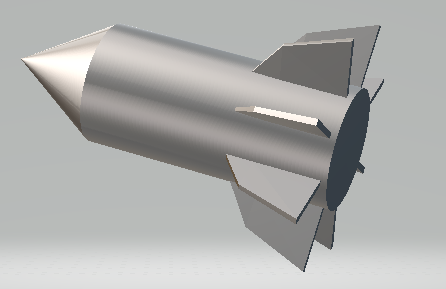
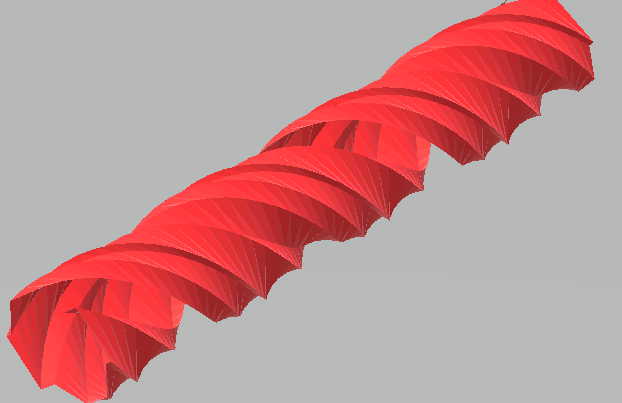
(define (rocket radius bodyheight noseheight fincount finbottom finheight finwidth finradians)
(dynamic-extrude2d
(path2d (ellipsegen .1 .1 360) #t)
(lambda (step r)
(if (< (mod (* r tau) (/ tau fincount)) finradians)
`((.1 . 0) (,radius . 0)
(,radius . ,finbottom) (,(+ radius finwidth) . ,finbottom)
(,(+ radius (* .6 finwidth)) . ,(+ finbottom (* .7 finheight)))
(,radius . ,(+ finbottom finheight))
(,radius . ,bodyheight) (.1 . ,(+ bodyheight noseheight)))
`((.1 . 0) (,radius . 0)
(,radius . ,finbottom) (,radius . ,finbottom)
(,radius . ,(+ finbottom (* .7 finheight)))
(,radius . ,(+ finbottom finheight))
(,radius . ,bodyheight) (.1 . ,(+ bodyheight noseheight)))
))))
(display (rocket 2 8 3 8 .2 4 2 .06))
;(display (gear-hollow 3 4 1 12 2))
;24sided diamond
;(display (surface-of-revolution (cut-gem-coordinates 3 2) 24))
;sample bowl
;;(display (surface-of-revolution (bowl-coordinates 3 2 .4 .3 .5 36) 36))
;sample cup
;;(display (surface-of-revolution (cup-coordinates 3 1 .2) 36))

One thought on “R5RS Scheme 3d Extruder”